




Hat Channel Profile Roll စက်ဖွဲ့စည်းခြင်း။



ဦးထုပ်ချန်နယ်များသည် အောက်ပိုင်းပရိုဖိုင်လိုအပ်သည့် purlin အဖြစ်အသုံးပြုနိုင်သည့် အခြားသံမဏိအမိုးဘောင်စနစ်တစ်မျိုးဖြစ်ပြီး အဖုံးစနစ်သည် ပိုမိုနီးကပ်သော purlin အကွာအဝေးလိုအပ်သည့်အတွက် စံ "Z" သို့မဟုတ် "C" purlins များကို အလွန်စျေးကြီးစေသည်။
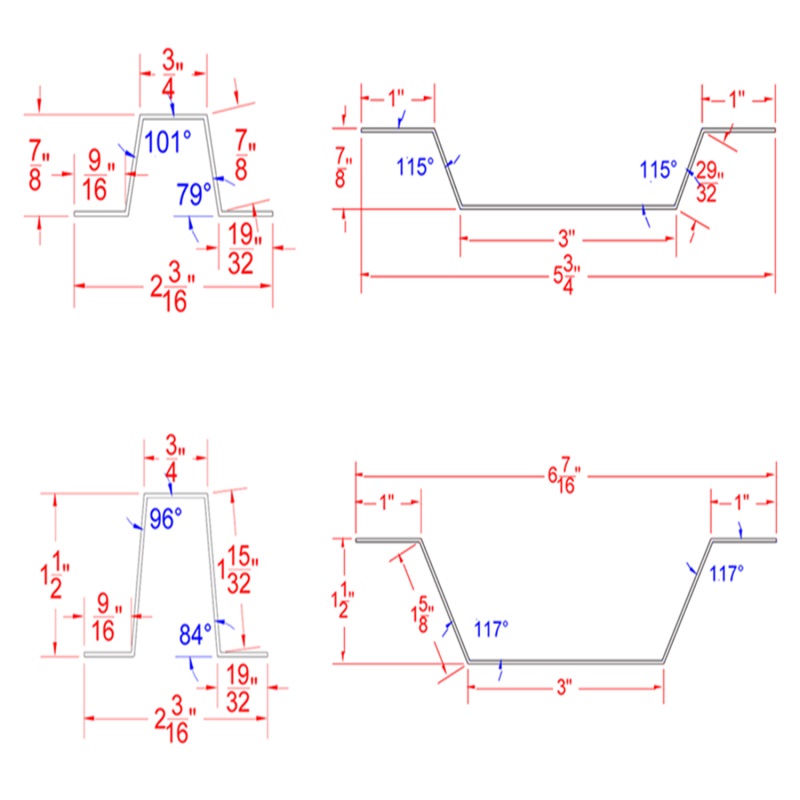
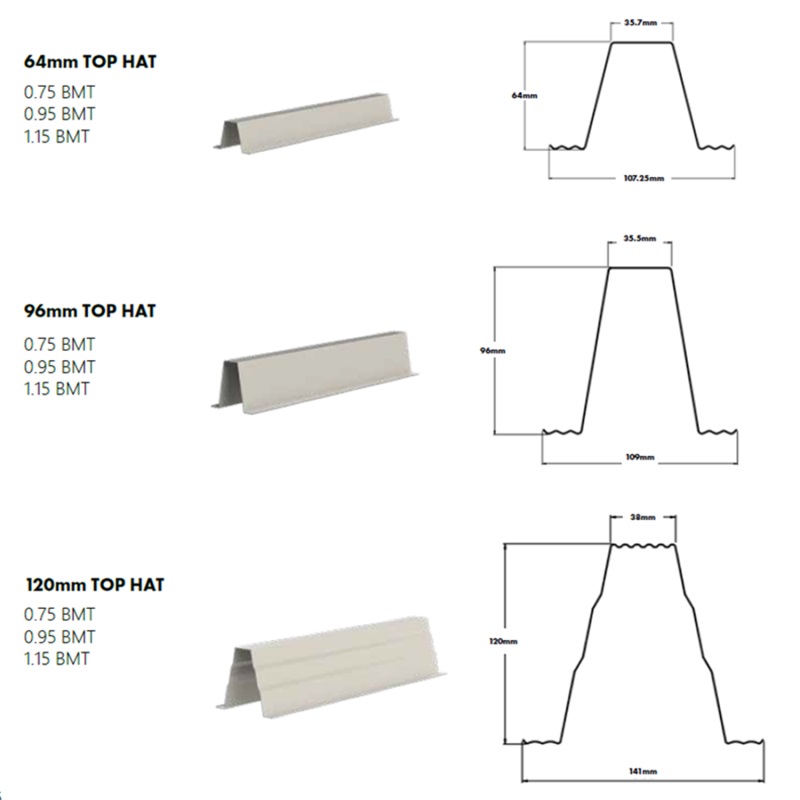
ကျွန်ုပ်တို့၏ဦးထုပ်ပရိုဖိုင်လိပ်ဖွဲ့စည်းခြင်းစက်သည် သတ္တု/သံမဏိအမိုးဆောက်လုပ်ရေးလုပ်ငန်းများတွင် တွင်ကျယ်စွာအသုံးပြုနိုင်သော ဦးထုပ်ချန်နယ်များပြုလုပ်ရန်အတွက်ဖြစ်သည်။



သင့်စာကို ဤနေရာတွင် ရေးပြီး ကျွန်ုပ်တို့ထံ ပေးပို့ပါ။




