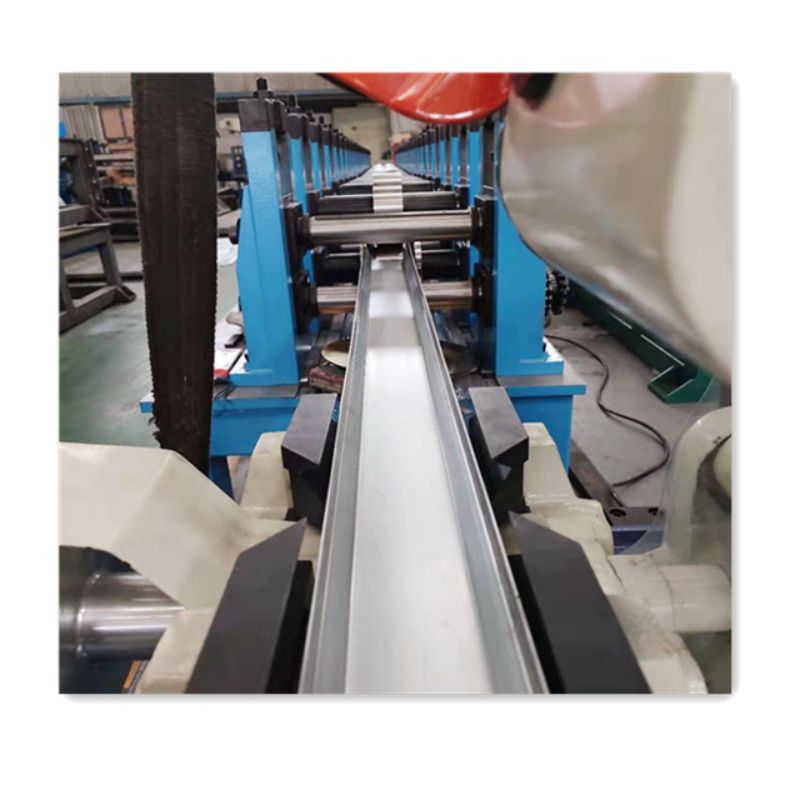
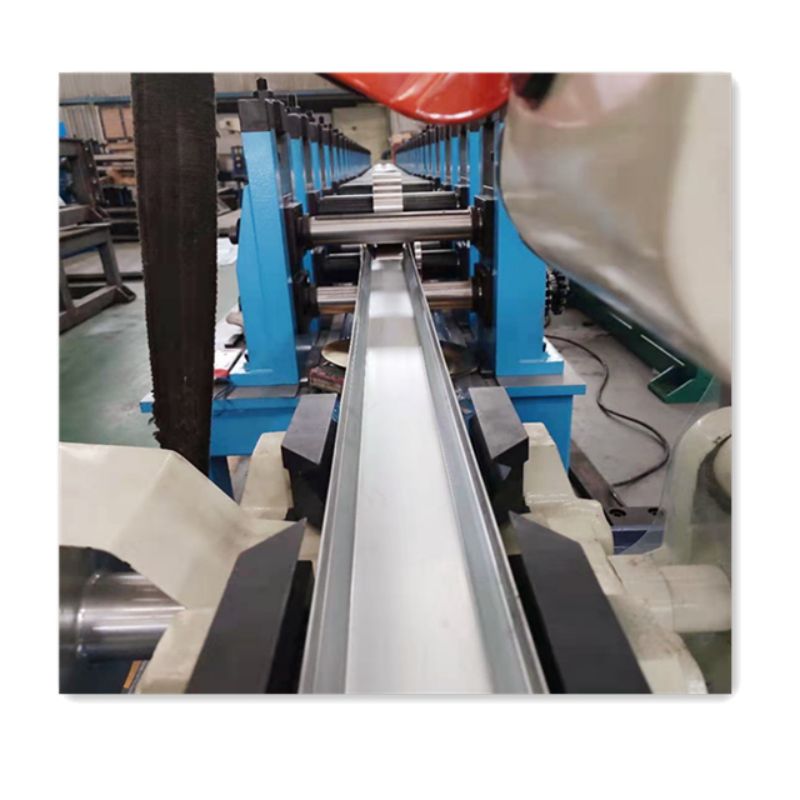
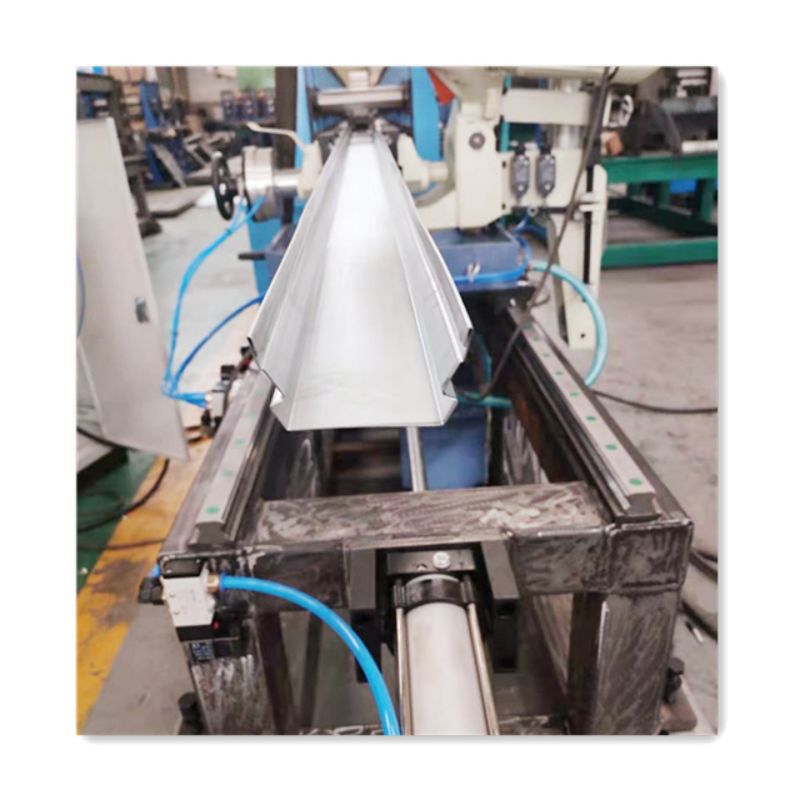
ထုတ်လုပ်မှုလုပ်ငန်း-
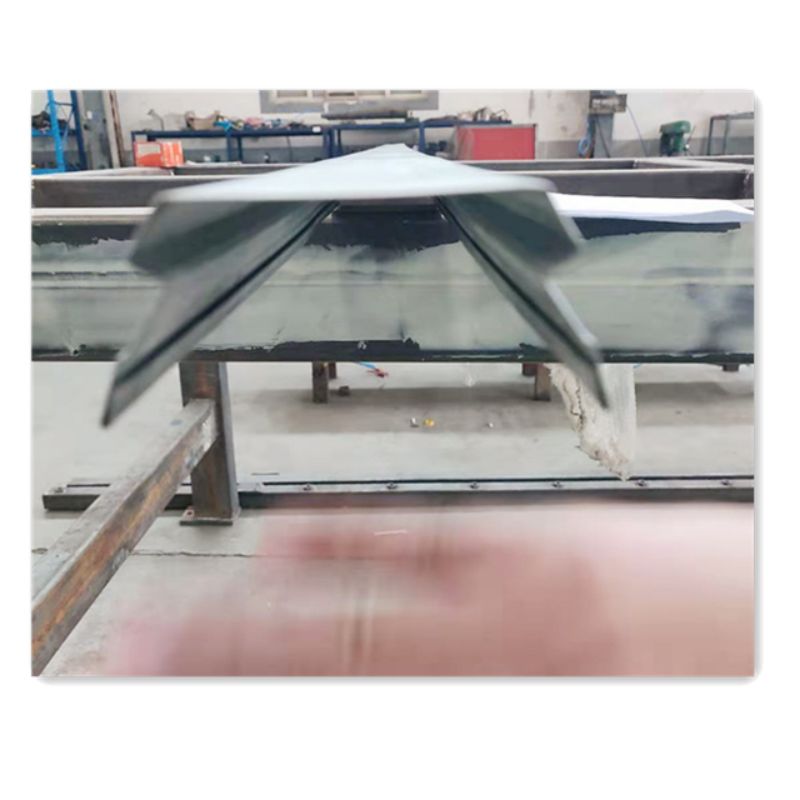
Uncoiling → leveling → Looper (သိုလှောင်မှု) → servo feeding → Multi-stations punching → forming station → hydraulic cutting → ထုတ်ကုန်ပြီးဆုံးသွားခြင်း
အဓိက ဘောင်များ-
| 1 | စက်ဖွဲ့စည်းပုံ | တစ်ဦးချင်းစီ archway ရပ်တည်ဖွဲ့စည်းပုံ |
| 2 | စုစုပေါင်းစွမ်းအား | မော်တာပါဝါ - 18.5kw
ဟိုက်ဒရောလစ်ပါဝါ - 5.5kw |
| 3 | Roller ဘူတာများ | အစက် ၁၈ လုံး |
| 4 | ကုန်ထုတ်စွမ်းအား | 15-25m/min |
| 5 | အလှဆင်ကိရိယာ | 3T hydraulic decoiler |
| 6 | Leverling အပိုင်း | အပေါ်ပိုင်းသည် 3 rollers ဖြစ်ပြီး အောက်ဘက်တွင် 4 stations (စုစုပေါင်း 7 rollers) |
| 7 | မောင်းစနစ် | လွတ်လပ်သောဂီယာအုံဖြင့် |
| 8 | ရှပ်အချင်း | ¢ 60mm အစိုင်အခဲဝင်ရိုး |
| 9 | ကြိတ်စက်ရုပ် | အမေရိကန် D2 D3 |
| 10 | အကြိုဖောက်ခြင်းနှင့် ဖြတ်ခြင်းစနစ် | ပစ္စည်းကို ပြောင်းဖို့ ကြိုဖြတ်တယ်။
အထိုးခံမှို၏ပစ္စည်း: Cr12 |
| 11 | ဟိုက်ဒရောလစ်ဖြတ်တောက်ခြင်းစနစ် | အပူကုသမှု 58-60° ဖြင့် Cr12 |
| 12 | ဟိုက်ဒရောလစ်ပါဝါ | 7.5KW |
အစိတ်အပိုင်းများ၏ သတ်မှတ်ချက်များ
| 1 | အလိုအလျောက် De-coiler | 1၊ ခေါင်းတစ်လုံး ဒီဇိုင်း
2၊ Loading weight: 3Tons
3, ဟိုက်ဒရောလစ်အလိုအလျောက်ချဲ့ထွင်ခြင်းနှင့်တင်းကျပ်
4၊ သင့်လျော်သောအကျယ်: <300mm
5၊ Coil ID: ¢500±20mm
6, Coil OD: ≤1200mm |
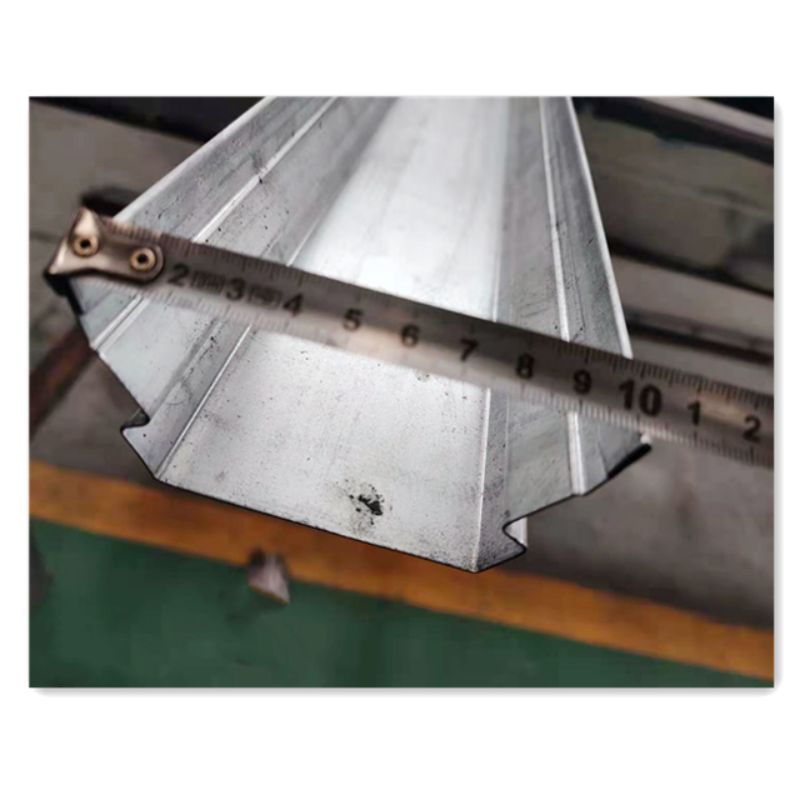
| 2 | Servo Feeding Leveling | - ၎င်းသည် အဆင့်ညှိရန်အတွက် ရိုလာ ၅ ခု၊ လမ်းညွှန် roller အတွဲ ၂ တွဲကို အသုံးပြုသည်။
- အမြင့်ဆုံးအဆင့်ညှိလိပ် အကျယ်- 300 မီလီမီတာ
- အများဆုံးလိပ်အထူ- 1 ~ 2mm နှင့်လိုက်လျောညီထွေဖြစ်အောင်
- အများဆုံးအလုပ်လုပ်မြန်နှုန်း- 20 m/min
- မောင်းနှင်ခြင်း- ဆာဗာမော်တာ
|
| 3 | ဘက်စုံသုံး Punching စက် | ဖောက်ခွဲစခန်း ၁ ခု၊
2, Servo မော်တာပါဝါ: 1.3KW
3၊ Servo မော်တာအမှတ်တံဆိပ်- Japan Yaskawa
4၊ သင့်လျော်သောအကျယ်: <300mm
5၊ မှိုကို အမြန်နေရာချထားခြင်း၊ ထပ်ခါတလဲလဲ နေရာချထားခြင်း။ |
| 4 | Roll စက်ဖွဲ့စည်းခြင်း။ | 1၊ မောင်းနှင်သောစနစ်- မော်တာ၊ လျှော့ကိရိယာ၊ ခရုပတ် bevel ဂီယာမောင်း
2၊ ပင်မစက်ပါဝါ- 15KW*2 Sets၊
3၊ မော်တာအမှတ်တံဆိပ်- SIEMENS BADE ဆာဗာမော်တာ
4၊ Module အစိတ်အပိုင်းများကို အမြန်နေရာချထားခြင်း၊ ထပ်ခါတလဲလဲ နေရာချထားခြင်း။
5၊ စခန်းများဖွဲ့စည်းခြင်း- 18 အဖွဲ့များဘူတာများ |
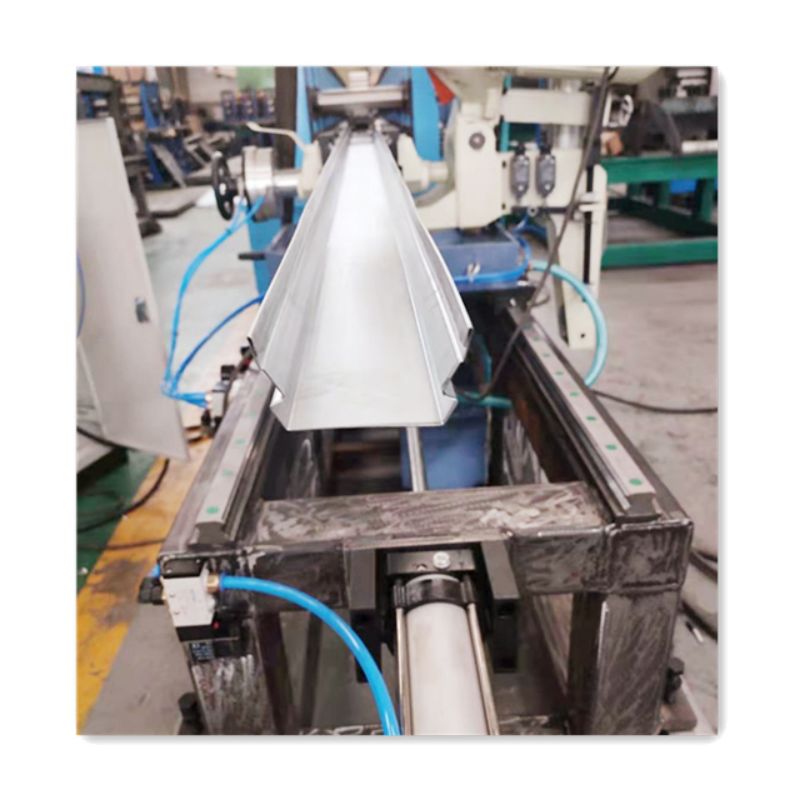
| 5 | ဟိုက်ဒရောလစ်ဖြတ်တောက်ခြင်းစက် | 1, ဟိုက်ဒရောလစ်တစ်ခုတည်းဘူတာရုံ၊
2, ဖြတ်တောက်မှုအင်အား: 30Tons၊
3, Cutting type: ဖြတ်တောက်ခြင်းကို ရပ်လိုက်ပါ။
4၊ Module အစိတ်အပိုင်းများကို အမြန်နေရာချထားခြင်း၊ ထပ်ခါတလဲလဲ နေရာချထားခြင်း။ |
| 6 | Computer Control Box ၊ | 1၊ Japan Mitsubishi motion controller PLC
2၊ Japan Yaskawa Servo စနစ်
3, လူသားစက်မျက်နှာပြင်နှင့်အတူထိတွေ့မျက်နှာပြင်
4၊ Schneider အားနည်းသောလက်ရှိထိန်းချုပ်မှု |
| 7 | ဟိုက်ဒရောလစ်စခန်း | 1၊ ဟိုက်ဒရောလစ်စနစ်ပါဝါ: 15KW
2၊ ဟိုက်ဒရောလစ်တန်ဖိုး- Huade၊
၃၊ ပန်ကာအအေးပေးစနစ် |